ラズベリーパイ(Raspberry Pi)の下ごしらえ
- 2017.02.13
- 工作
さて、忘備録的エントリーでございます。
aqrは極めてコアなユーザーですので、ほとんどの方には役に立ちません(きっぱり、と)
まあ、セットアップですが、ハマるハマる・・・。
用意するものですが、
- Raspberry Pi3(以下ラズパイ)
- USB電源(1ポートで2A以上、出来れば2.5A)&2Aケーブル
- MicroSD&カードリーダ
- Matlab&Simulink
- LANケーブル&Hubの空き
- マウス&キーボード(下記PC用とは別にあると便利)
- HDMIケーブル(ラズパイとモニタをつなぐ)
- PC(Windows)
です。
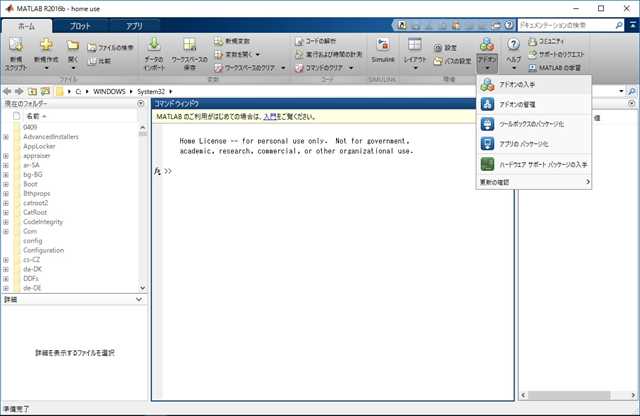
まずは、Matlabのアドオン>ハードウェアサポートパッケージを入手します。
Simulink用のラズパイのパッケージを入手するのですが、直接インストールでは最後までうまくインストールできなかったので、”ダウンロードのみ”でダウンロードします。これをUSBFlashやらSDカードに入れておきます。
次に、PCを再起動し、なるべくメモリ的にクリーンな状態で、コピーしておいておいたインストーラを実行します。(この時事前にMatlabは起動させない)
うまくインストールされると、次に、ラズパイのOS入りSDカードを作成します。
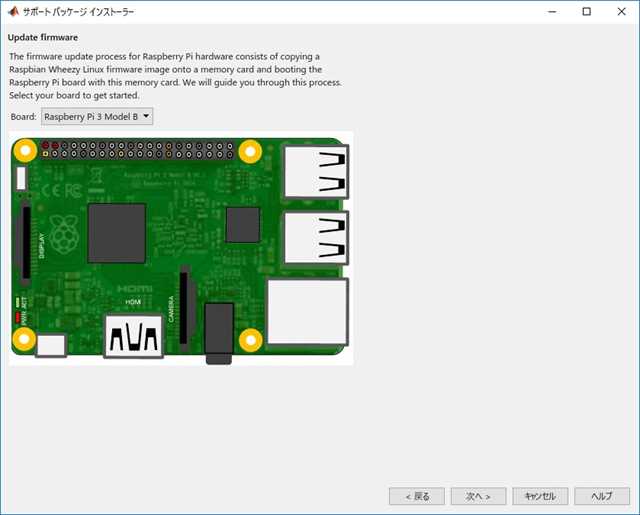
ラズパイ3(aqrの場合)を選んで、次に進みます。
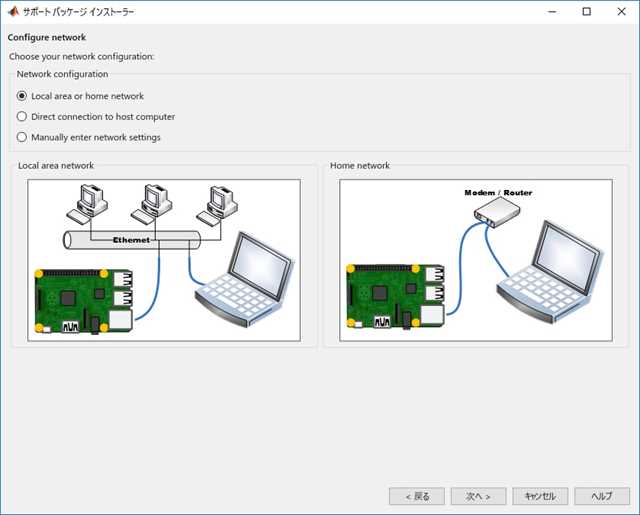
すると使用環境を選びます。ここでは、Manually・・・を選びます。
特に追加設定はいりません。(記憶では・・・。)ただし、設定されている内容は覚えておいてください。
ここで、指示に従って、カードリーダにSDカードを入れて、ドライブ指定すると、ラズパイのOSをインストールしてくれます。
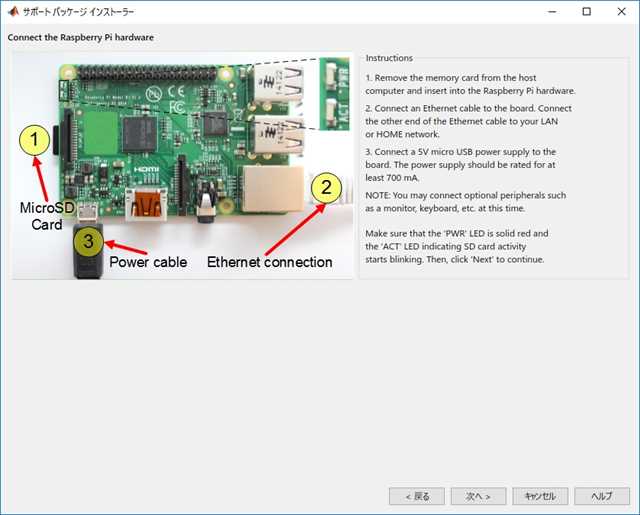
この後、上記のようにラズパイにSDさして、起動させろと出てきます。自動的に接続しようとしますが、まあ、うまくいかなくても大丈夫です。(aqrの場合)そのまま終了してしまいましょう。
とはいえ、ラズパイを起動さて、ログオンします。
(キーボード、マウス、モニタ、LANを接続します)
ログオンIDとPassはSDカード作成時に設定画面にあったはずです。
で、ifconfigと打ち込み(これは終息コマンドらしいけど)、IPアドレスを確認します。
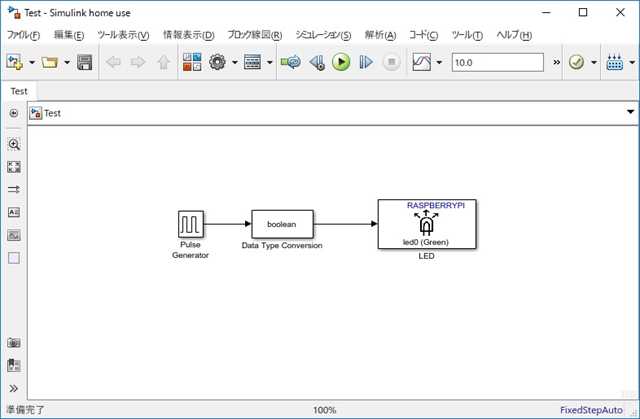
SImulinkユーザなら10秒で作れるLED点滅モデルを作成します。
コンフィグレーションパラメータの設定の中の、ID,Passを確認し、ボード名のところにIPアドレスを設定します。
で、ハードウェアに展開ボタンを押すと、ビルドし、転送され、実行されます。
おわり。
ほとんどはPCへのインストールではまりまくりでしたが、コネクトの部分うまくいかくて・・・。
これって、EmbeddedCoder普段から使ってる人しか、サポートなしに設定し終わらないと思う・・・。でも、Homeエディションはさぽーとあるのかしらん・・・。
でも、1.2GHzのCPUを簡単にホビーで使える時代が来るとは思いませんでしたね。
次はCAN・・・で、えりーぜにつなぐぞ(希望)
-
前の記事
神戸のパン屋(コムシノワ) 2017.01.22
-
次の記事
目玉焼きパン 2017.02.13